
포테닛의 플릿 매니저, MOSAI® (Multi-Robot Operation Software AI)
포테닛은 로봇 및 설비들을 유기적으로 연결시킴으로 확장된 군집 제어 기술의 실현했다. 자체적으로 개발한 포테닛의 자율주행 로봇은 물론 생산 및 제조 설비와의 통합을 통해 사람의 개입을 최소화 하고 복잡한 연계 작업들을 유연하게 처리할 수 있다.
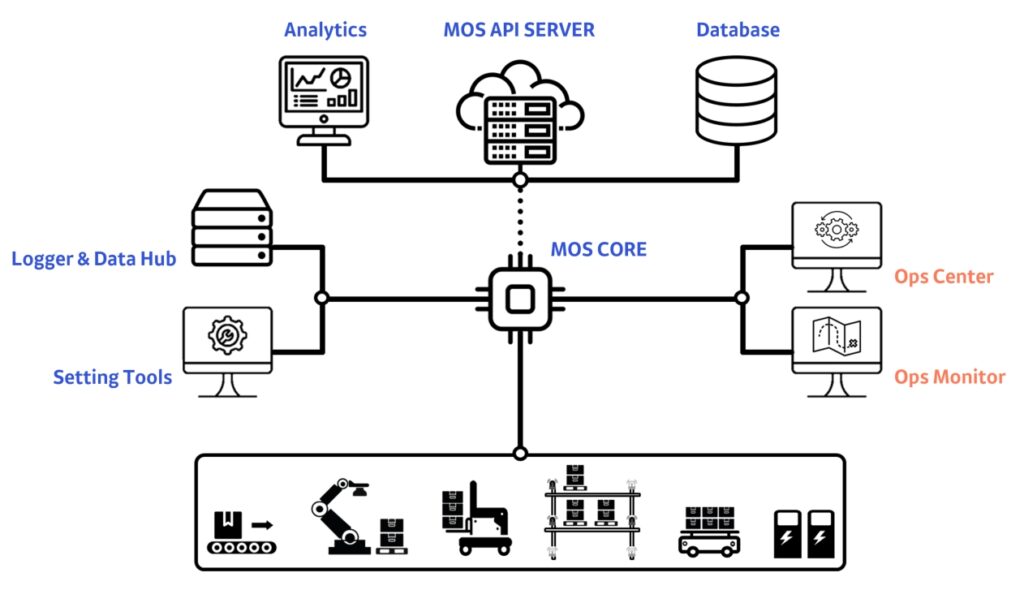
포테닛 플릿 매니저인 MOSAI®는 아래와 같은 어플리케이션을 제공한다.
- Ops Center: 전체 시스템의 운용을 위한 기능 제공
- Ops Monitor: 운용 중인 로봇의 위치, 상태 등을 가시적으로 제공
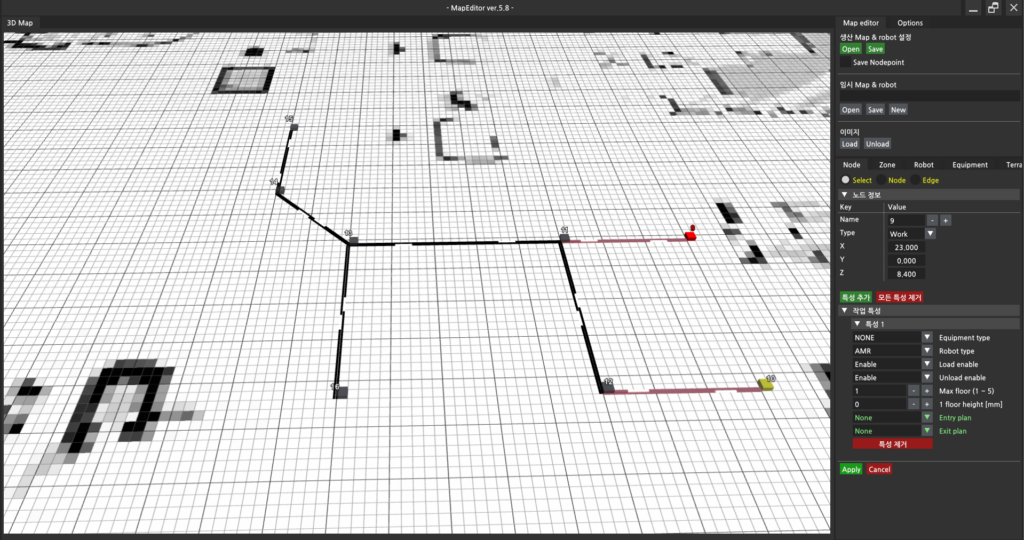
- Setting Tools: 지도 설정 및 시스템 파라미터 설정을 위해 사용
- Logger & Data Hub: [관리자용] 세부적인 로그기록, 시간, 내용을 확인할 때 사용
포테닛 플릿 매니저는 아래와 같은 기술을 제공한다.
- 로봇의 상태 관리: 배터리가 적은 로봇은 충전소로 이동시켜 24시간 가동할 수 있도록 한다.
- 로봇의 위치 선정: 로봇의 동선 낭비를 최소화 하기 위한 위치에 배치시킴으로써 전력 효율을 높임.
- 최적 경로 생성: 최단 경로 이동이 기본이지만, 트래픽이 많은 구역을 피해 우회 할 수 있는 경로를 선택할 수 있음.
- 충돌 예측: 갑작스러운 충돌이 예측될 경우 로봇을 정지시켜 사고를 예방.
- 자동 작업 생성: ERP 또는 MES와 같은 상위 어플리케이션과의 통합을 통해 필요한 작업을 자동으로 생성.
- 수동 작업 관리: 필요에 따라 원하는 작업을 추가함으로 써 예측되지 않은 상황에 대처할 수 있음.
- 다중 로봇 경로 생성: 다수의 로봇들이 동시에 충돌없이 이동하기 위한 이동 경로를 계산하기 위한 알고리즘. (추가 중)


포테닛 플릿 매니저인 MOSAI®를 사용하면, 아래와 같은 기대 효과를 얻을 수 있다.
1. 접근성 향상: 인터넷 연결이 가능한 어디서든 사용자가 관제시스템에 접근이 가능.
2. 데이터 중앙화 및 백업: 로컬에 저장되어 왔던 데이터들을 중앙화 함으로써 유지보수에 용이하고 데이터의 활용도를 높일 수 있음.
3. 시스템 성능 가시화: 작업량, 이력, 시간 당 효율 등에 대한 지표를 제공함으로써 사용자가 관제시스템의 성능을 한눈에 파악할 수 있음.
4. 유지보수 비용 감소: 중앙화 된 데이터 분석을 통해 유지보수 및 관리 효율 증진.
귀사의 자동화 여정을 탐색하는 데 도움을 줄 수 있는 친절하고 전문 지식으로 무장한 포테닛 담당자에게 문의하세요