모바일 로봇(Mobile Robot)이 현장에 더 많이 배치되기 시작하면서, SLAM(동시적 위치추정 및 지도작성), 위치추정(Localization), 안내(Guidance) 등 몇 가지 용어에 대해 더욱 명확히 이해해야 할 필요성도 커졌다. 그래서 핵심적인 내용을 정리해본다.
SLAM(동시적 위치추정 및 지도작성)
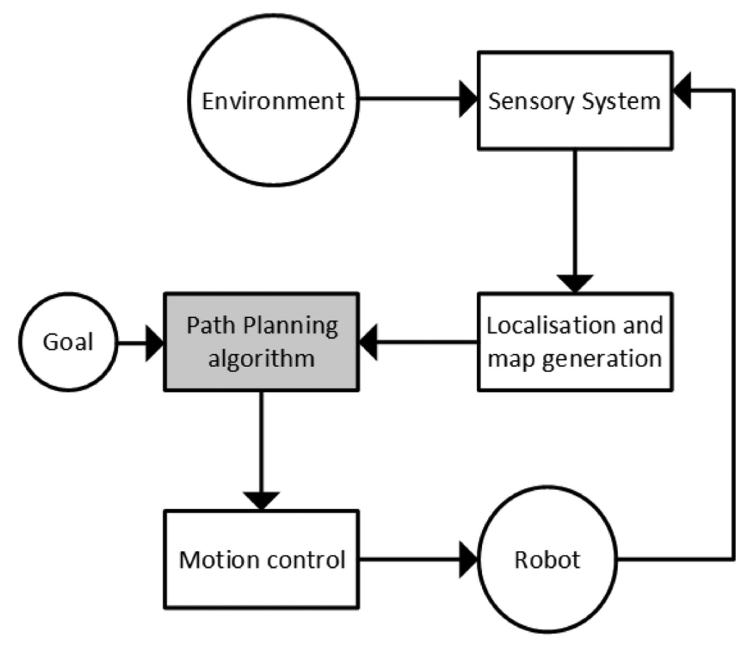
모바일 로봇은 SLAM(Simultaneous Localization and Mapping) 기술을 사용해 외부 환경에 대한 지도를 작성하고, 작성된 지도에서 모바일 로봇의 현재 위치를 인식한다. 그 다음, 현재 위치에서 목적 위치까지 이동하는 최적의 경로를 찾고, 이 경로를 따라 주행한다. 이 떄, 최적의 경로를 찾는 과정을 경로계획(Path Planning)이라고 부른다.
즉, 모바일 로봇이 A지점 (x1, y1, θ1)에서 B지점 (x2, y2, θ2)으로 이동하는 방법을 내비게이션(Navigation)이라고 부르는데, 환경인식, 위치추정(Localization), 경로계획 그리고 동작(주행) 제어라는 네 가지 과제*를 해결해야 하는 데, 그 중에서 위치추정 및 경로계획 알고리즘을 핵심 요소라고 볼 수 있다.
한편, 안내선으로 가이드되는 모바일 로봇은 주어진 가이드 라인을 따라 주행하기 때문에 위와 같이 복잡한 알고리즘은 필요하지 않다.
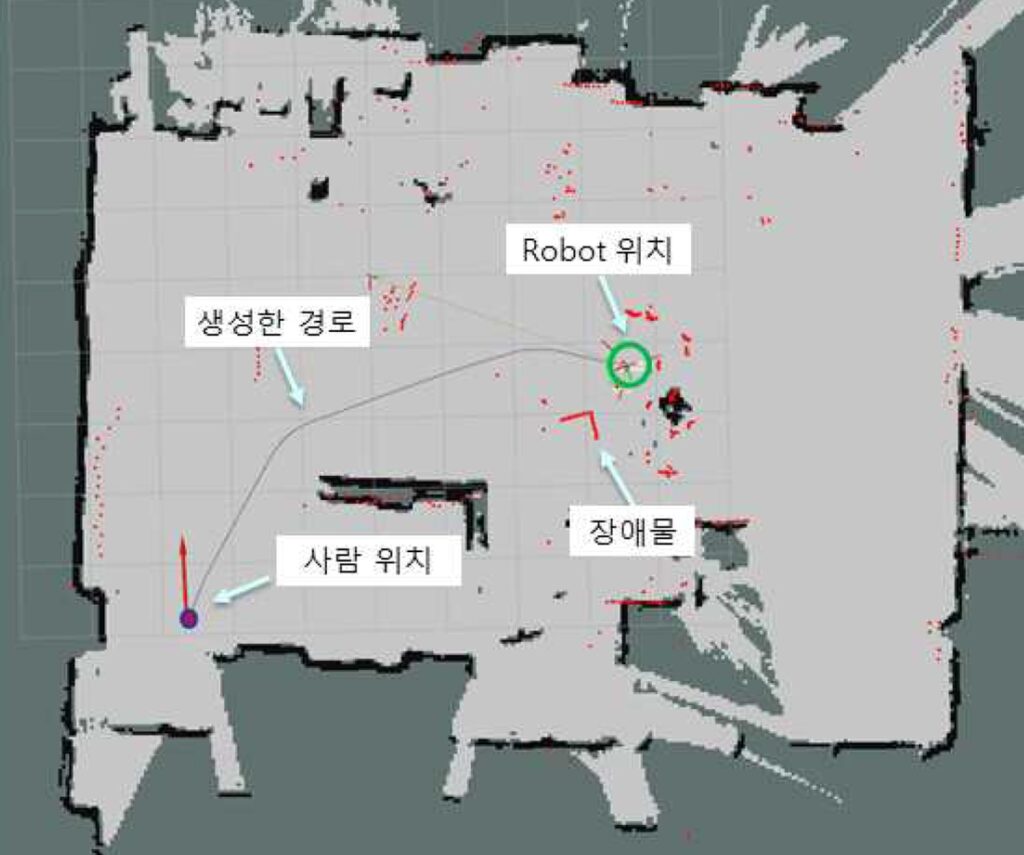
위치추정은 이동 중인 모바일 로봇의 현재 좌표, 즉 x, y, θ(로봇의 방향) 값을 알아 내는 과정이다. 아래와 같은 방법이 많이 사용된다.
- 2D Lidar SLAM : 2차원 포인트 클라우드를 정합하여 추정, 지도와 비교, 삼각측량 이용
- 3D Lidar SLAM : 3차원 포인트 클라우드를 정합하여 추정. 지도와 비교
- 비주얼 SLAM : 카메라를 활용한 시각적 SLAM 기술
실제로 모바일 로봇의 실제 움직임을 측정하는 주행거리측정(Odometry) 기술과 보조적으로 반사판(Reflector)를 사용하여 정밀도를 높이는 경우도 많이 볼 수 있다.
안내(Guidance)
모바일 로봇이 시설에 설치된 경로(가이드 라인)를 따라 주행할 때, 주행 경로를 안내하는 기술을 의미한다.
- 자기 (Magnetic) : 바닥에 부착/내장된 자기 테이프를 따라 주행
- 광학 (Optical) : 바닥에 그려진 선을 따라 주행하는 방식이며, 흑백 또는 컬러 테이프를 사용
- 유도선 (Inductive Wire) : 바닥에 설치된 유도선을 따라 주행
- RFID 태그, QR 코드 : 일반적으로 바닥에 배치하여 주행 중 정지 위치 등 특정 위치를 인식
현재에도 안내(Guidance) 기술을 사용하는 모바일 로봇은 현장에서 많이 사용된다.
모바일 로봇의 가격이 비교적 저렴하고, 기술 구현이 SLAM 내비게이션 대비 단순하기 때문이다. 그러나 시설에 안내 장치를 설치하고 유지보수하는 작업에는 비용이 많이 소요되고, 가이드 라인 변경이 필요한 경우, 안내 인프라를 바꿔야 하기 때문에 대응할 수 있는 유연성도 부족하다.
모바일 로봇을 활용하여 자동화 목표를 달성하기 위해서는 문제 해결에 사용할 다양한 기술과 운영 측면의 장단점을 잘 분석하고, 상황에 맞는 적정 기술을 선정하는 것이 중요하다.
* H. S. Hewawasam, M. Y. Ibrahim and G. K. Appuhamillage, “Past, Present and Future of Path-Planning Algorithms for Mobile Robot Navigation in Dynamic Environments,” in IEEE Open Journal of the Industrial Electronics Society, vol. 3, pp. 353-365, 2022, doi: 10.1109/OJIES.2022.3179617.